

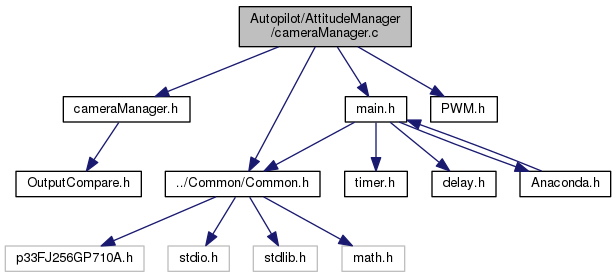
Go to the source code of this file.
Functions | |
| unsigned int | cameraPollingRuntime (long double latitude, long double longitude, long int time, unsigned int *pictureCount, int rollAngle, int pitchAngle) |
| void | triggerCamera (int pwmSignal) |
| void | setTriggerDistance (float distance) |
| int | cameraGimbalStabilization (float rollAngle) |
| void | setGimbalOffset (int pwmSignal) |
| int | goProGimbalStabilization (float rollAngle) |
| void | setGoProGimbalOffset (int pwmSignal) |
| int | goProVerticalstabilization (float pitchAngle) |
| void | setVerticalOffset (int pwmSignal) |
| void | lockGoPro (int lock) |
Variables | |
| float | distance = 0 |
| long double | lastLongitude = 0 |
| long double | lastLatitude = 0 |
| long int | cameraTimerCount = 0 |
| float | pictureDistance = 10 |
| int | lastSignal = MIN_PWM |
| int | triggerSignal = 0 |
| int | gimbalOffset = 240 |
| int | goProgimbalOffset = 325 |
| int | verticalOffset = -100 |
| int | rollLimit = 30 |
| char | overrideTrigger = 0 |
| char | resting = 1 |
| char | lockGoProPitch = 0 |
| char | lockGoProRoll = 0 |
Function Documentation
| int cameraGimbalStabilization | ( | float | rollAngle | ) |

| unsigned int cameraPollingRuntime | ( | long double | latitude, |
| long double | longitude, | ||
| long int | time, | ||
| unsigned int * | pictureCount, | ||
| int | rollAngle, | ||
| int | pitchAngle | ||
| ) |
Definition at line 32 of file cameraManager.c.


| int goProGimbalStabilization | ( | float | rollAngle | ) |

| int goProVerticalstabilization | ( | float | pitchAngle | ) |

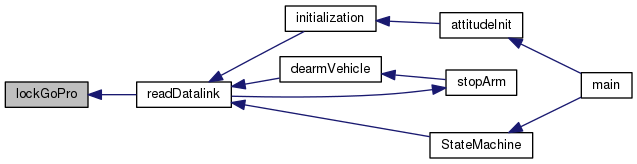
| void lockGoPro | ( | int | lock | ) |
| void setGimbalOffset | ( | int | pwmSignal | ) |

| void setGoProGimbalOffset | ( | int | pwmSignal | ) |
Definition at line 104 of file cameraManager.c.
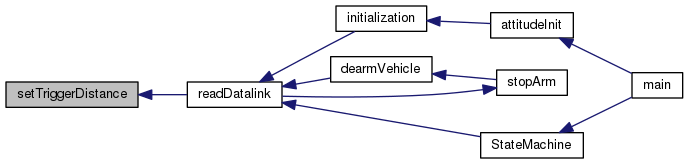
| void setTriggerDistance | ( | float | distance | ) |
| void setVerticalOffset | ( | int | pwmSignal | ) |
Definition at line 125 of file cameraManager.c.
| void triggerCamera | ( | int | pwmSignal | ) |

Variable Documentation
| long int cameraTimerCount = 0 |
Definition at line 19 of file cameraManager.c.
| float distance = 0 |
Definition at line 16 of file cameraManager.c.
| int gimbalOffset = 240 |
Definition at line 23 of file cameraManager.c.
| int goProgimbalOffset = 325 |
Definition at line 24 of file cameraManager.c.
| long double lastLatitude = 0 |
Definition at line 18 of file cameraManager.c.
| long double lastLongitude = 0 |
Definition at line 17 of file cameraManager.c.
| int lastSignal = MIN_PWM |
Definition at line 21 of file cameraManager.c.
| char lockGoProPitch = 0 |
Definition at line 29 of file cameraManager.c.
| char lockGoProRoll = 0 |
Definition at line 30 of file cameraManager.c.
| char overrideTrigger = 0 |
Definition at line 27 of file cameraManager.c.
| float pictureDistance = 10 |
Definition at line 20 of file cameraManager.c.
| char resting = 1 |
Definition at line 28 of file cameraManager.c.
| int rollLimit = 30 |
Definition at line 26 of file cameraManager.c.
| int triggerSignal = 0 |
Definition at line 22 of file cameraManager.c.
| int verticalOffset = -100 |
Definition at line 25 of file cameraManager.c.
